行業(yè)動(dòng)態(tài)
您現(xiàn)在的位置: 插入式電磁流量計(jì) > 新聞中心 > 行業(yè)動(dòng)態(tài)
摘 要:插入式電磁流量計(jì)工作原理是基于法拉第電磁感應(yīng)定律,管道中氣體、液體介質(zhì)流經(jīng)傳感器探頭時(shí)切割磁感線,引起磁感應(yīng)電動(dòng)勢(shì),因此探頭周邊流場(chǎng)的分布情況對(duì)流量計(jì)的測(cè)量結(jié)果會(huì)產(chǎn)生比較大的影響。文中采用Fluent流體仿真軟件對(duì)電磁流量計(jì)傳感器的多種幾何模型進(jìn)行仿真分析,觀察傳感器在流場(chǎng)中形成的高速繞流區(qū)域和邊界層,研究傳感器周邊流場(chǎng)變化給電極帶來的影響。提出將傳感器的物理結(jié)構(gòu)進(jìn)行優(yōu)化,將傳感器的探頭位置設(shè)計(jì)安裝于傳感器兩邊,并將圓柱體的物理結(jié)構(gòu)模型改成橢圓型和橢圓水滴型。通過進(jìn)一步建模仿真發(fā)現(xiàn),橢圓水滴型傳感器測(cè)量的信號(hào)強(qiáng)度更強(qiáng)、穩(wěn)定性也較高。
1. 引言
插入式電磁流量計(jì)通常包含傳感器和變送器兩部分。傳感器主要是用來測(cè)量介質(zhì)流動(dòng)切割磁感線產(chǎn)生的感應(yīng)電動(dòng)勢(shì),并將其傳輸?shù)阶兯推鳎蛔兯推鲗⒋烁袘?yīng)電動(dòng)勢(shì)信號(hào)進(jìn)行放大,并將放大后的信號(hào)轉(zhuǎn)換成可以直觀檢測(cè)到的標(biāo)準(zhǔn)輸出信號(hào) [1] 。
通常情況下,插入式電磁流量計(jì)探頭普遍安裝于底側(cè)區(qū)域,但是這樣設(shè)計(jì)的弊端是檢測(cè)到的信號(hào)會(huì)比較微弱而不宜被檢測(cè)到。文中提出將探頭安裝于傳感器兩側(cè),利用傳感器兩側(cè)的繞流引起的高速流場(chǎng)信號(hào)來提高信噪比。普通插入式流量計(jì)傳感器的外部形狀是圓柱體,周圍的繞流作用會(huì)使外部流場(chǎng)帶來比較大的波動(dòng)。本文先從優(yōu)化傳統(tǒng)插入式電磁流量計(jì)物理結(jié)構(gòu)的角度出發(fā),先進(jìn)行理論推導(dǎo)分析,進(jìn)一步提出了橢圓水滴型的物理外形。
2. 插入式流量計(jì)流場(chǎng)分析
2.1. 插入式流量計(jì)結(jié)構(gòu)分析
傳感器插入管道時(shí),介質(zhì)在流過探頭時(shí)將產(chǎn)生繞流現(xiàn)象,傳感器周圍會(huì)有比較大的流場(chǎng)波動(dòng),電極測(cè)量到的信號(hào)穩(wěn)定性差,波動(dòng)大 [2] 。文中采用CFD技術(shù)對(duì)傳感器的物理結(jié)構(gòu)建模,分析傳感器還有電極周邊的流場(chǎng)分布情況,進(jìn)而為選擇最佳的傳感器模型提供設(shè)計(jì)方案和依據(jù)。
通常,插入式流量計(jì)結(jié)構(gòu)有以下兩種設(shè)計(jì)模型,傳感器外形都是圓柱體,主要區(qū)別在于電極的安置位置,一種是安置于傳感器的兩側(cè)(以下簡(jiǎn)稱結(jié)構(gòu)I),一種是安置于傳感器的底端(以下簡(jiǎn)稱結(jié)構(gòu)II) [3] ,模型I、模型II分別如圖1所示。
圖1
2.2. 插入式電磁流量計(jì)流場(chǎng)分析
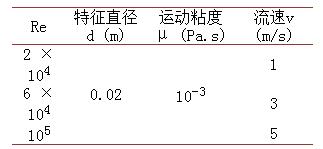
文中采用Fluent流體仿真軟件對(duì)傳感器周邊流場(chǎng)進(jìn)行建模仿真,雷諾數(shù)Re = ρvd/μ,參數(shù)d、µ和v分表代表特征直徑、運(yùn)動(dòng)粘度和流速,雷諾數(shù)如表1所示。
三維模型仿真結(jié)果不便于觀測(cè),并且要對(duì)模型內(nèi)部的層面的計(jì)算結(jié)果進(jìn)行觀察,因此要?jiǎng)?chuàng)建一些內(nèi)部面。利用Gambit構(gòu)建仿真模型,重點(diǎn)觀測(cè)電極所處區(qū)域周邊流場(chǎng) [4] 。
2.3. 模型I傳感器流場(chǎng)分析
文中主要研究電極周圍的流場(chǎng)分布情況,因?yàn)橛袌A柱繞流的影響,所以我們觀測(cè)電極所在平面兩側(cè)
流場(chǎng)的變化情況。進(jìn)口流速設(shè)定1 m/s,文中采用速度等值圖來觀測(cè)電極所處位置的流場(chǎng)的變化情況,傳感器速度等值圖如下圖2所示。
圖2
從圖2可以發(fā)現(xiàn),傳感器周邊產(chǎn)生圓柱繞流,雷諾數(shù)Re = 2 × 104,此時(shí)處于亞臨界,傳感器尾流變化成湍流態(tài),邊界層狀態(tài)仍是層流態(tài) [5] ,尾部有渦街現(xiàn)象產(chǎn)生。
由圖2可以發(fā)現(xiàn),水流流經(jīng)流量計(jì)的時(shí)候,流量計(jì)周圍的流場(chǎng)會(huì)受到圓柱繞流影響,兩側(cè)部分產(chǎn)生了高速流場(chǎng),水流無法很好地貼合流量計(jì)后半段壁面流動(dòng),致使流速減小,在120?時(shí),邊界層開始產(chǎn)生分離現(xiàn)象,產(chǎn)生“尾渦區(qū)”,這在一定程度上破壞了周圍流場(chǎng)的穩(wěn)定性,這時(shí)信號(hào)測(cè)量穩(wěn)定性較差。
2.4. 模型II傳感器流場(chǎng)分析
進(jìn)口設(shè)定流速1 m/s,速度矢量云圖如圖3所示。
圖3
圖3是圓管x軸方向平面圖,從圖5發(fā)現(xiàn),水流受到傳感器的阻擋,其流速方向改向傳感器右下區(qū)域,右下側(cè)部區(qū)域流速較高,而此時(shí)底面的流速較小,由圖中可以明顯發(fā)現(xiàn)在傳感器背側(cè)有較大渦流區(qū)域。將電極所處部分區(qū)域放大,速度等值圖如圖4所示。
圖4
從圖4可以看出,雖然電極位置安裝于底面,削弱了繞流作用的影響,但此時(shí)測(cè)量到的流場(chǎng)信號(hào)強(qiáng)度不強(qiáng),引起傳感器信噪比較低。
2.5. 模型I與模型II傳感器對(duì)比分析
對(duì)比模型I與模型II仿真結(jié)果我們知道,這兩種模型傳感器各有優(yōu)點(diǎn)和缺點(diǎn)。
模型I傳感器的優(yōu)點(diǎn):由于繞流作用,探頭此時(shí)檢測(cè)到的信號(hào)強(qiáng)度較強(qiáng);缺點(diǎn):在距離探頭較近的區(qū)域,傳感器的邊界層發(fā)生分離,電極周邊流場(chǎng)產(chǎn)生了較大波動(dòng),探頭檢測(cè)到的信號(hào)穩(wěn)定性較差、波動(dòng)較大。
模型II傳感器的優(yōu)點(diǎn):由于我們將探頭安裝于底側(cè),由于遠(yuǎn)離“尾渦區(qū)”,探頭周圍流場(chǎng)相對(duì)穩(wěn)定些;缺點(diǎn):從圖3和圖4我們可以發(fā)現(xiàn),雖然傳感器右下側(cè)流場(chǎng)較高,但是在接近底面的區(qū)域流場(chǎng)速度不高,探頭由于處在此流場(chǎng),因此測(cè)量到的信號(hào)強(qiáng)度不如模型I強(qiáng)。
因此,上述模型的流量計(jì)不能夠滿足穩(wěn)定性和信號(hào)強(qiáng)度的雙重要求。目前常見傳感器大都采用模型II設(shè)計(jì),但當(dāng)介質(zhì)流速較低時(shí),探頭檢測(cè)到的信號(hào)強(qiáng)度極其微弱,傳感器信噪比將會(huì)受到較大影響。
文中計(jì)劃采用模型I,即將探頭安裝于傳感器兩側(cè),利用圓柱繞流帶來的高速流場(chǎng),提高探頭探測(cè)能力。但由于此時(shí)邊界層有分離脫落現(xiàn)象,探頭周邊流場(chǎng)信號(hào)波動(dòng)變化較大,穩(wěn)定性不高。
3. 新型插入式流量計(jì)流場(chǎng)分析
模型I傳感器探測(cè)信號(hào)不穩(wěn)定,是因?yàn)樘筋^的安裝位置距離邊界層分離點(diǎn)處較近所引起的,因?yàn)槭艿?ldquo;尾渦區(qū)”的影響,探頭周邊流場(chǎng)波動(dòng)較大,探頭檢測(cè)信號(hào)穩(wěn)定性也不高。
較為有效的方法就是使傳感器壓差阻力減小,進(jìn)而使邊界層的分離點(diǎn)盡量向后推遲。繞流物體的形狀對(duì)壓差阻力有較大影響因素,為此文中從改變物體外形著手,來進(jìn)一步研究怎樣使壓差阻力減小。
由伯努力(Bernoulli)方程可知,水流動(dòng)能變化量的大小能夠影響物體表面壓強(qiáng)變化量,他們之間成正相關(guān):
 公式1
公式1 等式左邊 表示單位流體介質(zhì)體積上壓力的勢(shì)能,
表示單位流體介質(zhì)體積上壓力的勢(shì)能, 表示單位流體介質(zhì)體積上動(dòng)能,等式右邊為常數(shù)。
表示單位流體介質(zhì)體積上動(dòng)能,等式右邊為常數(shù)。
由于粘性力影響,介質(zhì)流經(jīng)物體表面時(shí),物體表面介質(zhì)速度會(huì)減小。流體在流到物體后半部分時(shí),邊界層會(huì)發(fā)生分離,進(jìn)而產(chǎn)生渦流。而伯努利原理告訴我們,流體的動(dòng)能與勢(shì)能的和是一個(gè)定量,二者是反比關(guān)系,所以“尾渦區(qū)”的壓力勢(shì)能勢(shì)必會(huì)降低,從而形成低壓區(qū)。根據(jù)壓差阻力公式(1),物體壓差阻力的決定性因素是物體與水流相互作用的最大橫截面積,而壓差阻力又被物體前后的壓強(qiáng)差所直接影響,這個(gè)壓強(qiáng)差也叫做壓強(qiáng)梯度 。
為盡量降低壓差的阻力,降低因物體后半部流動(dòng)減速過快引起的流動(dòng)分離,設(shè)計(jì)外形的時(shí)候,盡量讓物體的后部流動(dòng)速度緩慢降低,為此引出使物體得形狀由圓柱變?yōu)榍懊鎴A后面尖的流線體,比如外形橢圓水滴狀物體,水流能夠較好地經(jīng)過流線型物體的表面,而幾乎沒有渦流現(xiàn)象 [7] 。
流體的運(yùn)動(dòng)中,流線型的物體所受阻力很小,壓差得阻力也很小,摩擦阻力主要控制繞流的阻力。
3.1. 橢圓水滴型電磁流量計(jì)流場(chǎng)分析
流線型主要有三類,卡克斯流線型、雙半橢圓型與拋物線 + 半橢圓型。
分別對(duì)上面不同流線型用Fluent流體仿真軟件進(jìn)行仿真,流速不相同,雷諾數(shù)也不相同,不同的流線型的摩擦阻力和壓差阻力關(guān)系圖6如下所示。
綜上分析知道,以上三種流線型當(dāng)中,雙半橢圓型與拋物線 + 半橢圓型流線體的壓差阻力相對(duì)較小,所以分別選擇雙半橢圓型與拋物線 + 半橢圓型流線體來設(shè)計(jì)傳感器的外形 [8] 。
(1) 由第一節(jié)結(jié)論可知,相比模型II的傳感器來說,模型I傳感器信號(hào)的探測(cè)強(qiáng)度更強(qiáng),因此筆者計(jì)劃將探頭安裝于傳感器兩邊;
(2) 通常情況下,傳感器外部形狀多為圓柱狀,由于繞流作用的產(chǎn)生,探頭后面將有渦街現(xiàn)象,進(jìn)而引起探頭周圍的流場(chǎng)波動(dòng)較大,探測(cè)信號(hào)也不穩(wěn)定,所以筆者選用傳感器外形的橫截面是雙半橢圓型的橢圓型柱體和拋物線 + 半橢圓型的橢圓水滴型柱體,盡量使傳感器得邊界層分離點(diǎn)往后邊推遲,將探頭處于穩(wěn)定的流場(chǎng)中。與普通圓柱型比較,這兩種流量計(jì)和流場(chǎng)流動(dòng)貼合度較好。
由于傳統(tǒng)圓柱型的插入式電磁流量計(jì)由于自身形狀不可避免的會(huì)對(duì)所測(cè)流場(chǎng)產(chǎn)生一定干擾,電極檢測(cè)到的信號(hào)不夠理想,本文計(jì)劃分析設(shè)計(jì)出一種信號(hào)探測(cè)強(qiáng)度較強(qiáng),探測(cè)信號(hào)穩(wěn)定的傳感器,為此我們還要對(duì)雙半橢圓型的橢圓型柱體和拋物線 + 半橢圓型的橢圓水滴型柱體模型進(jìn)一步分析。
3.2. 橢圓水滴型電磁流量計(jì)建模仿真
用Fluent流體仿真軟件模擬流場(chǎng)仿真,設(shè)定水流流速為3 m/s,對(duì)管道中流場(chǎng)的情況進(jìn)行分析,由于探頭安裝在傳感器兩邊,本文需要分析探頭周邊流場(chǎng)分布情形,所以我們選擇z平面視圖來觀測(cè)傳感器的兩邊流場(chǎng)分布。
由前面分析知道,模型I流量計(jì):流量計(jì)的探頭安裝于傳感器的兩邊,外部結(jié)構(gòu)是圓柱形,為了更加方便的將模型I流量計(jì),橢圓型流量計(jì),橢圓水滴型流量計(jì)流場(chǎng)進(jìn)行直觀對(duì)比,三種流量計(jì)Fluent仿真圖如圖7,圖8和圖9所示。
橢圓型流量計(jì):從圖8可以發(fā)現(xiàn),根據(jù)選取電極所在平面放大后的速度云圖進(jìn)行觀察,可以看出,水流流經(jīng)橢圓型流量計(jì)的時(shí)候,水流可以較好的貼合橢圓型流量計(jì)流動(dòng),“尾渦區(qū)”得到了很好的抑制,流量計(jì)前后部分的壓差阻力較圓柱型流量計(jì)要減小很多,這就相對(duì)穩(wěn)定了流量計(jì)周圍的流場(chǎng),所以將流量計(jì)模型制作成橢圓型能使其在流場(chǎng)中的穩(wěn)定性更強(qiáng)。
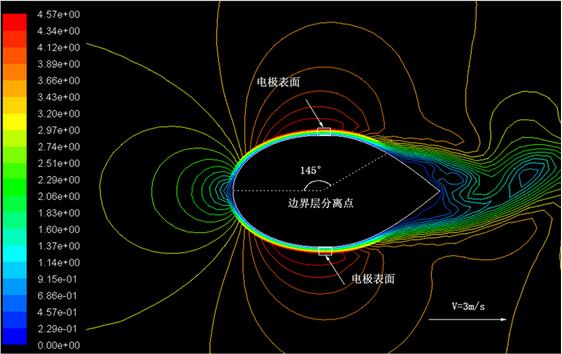
橢圓水滴型流量計(jì):從圖9可以發(fā)現(xiàn),流量計(jì)兩邊有高速的流場(chǎng),流速最大值為4.57 m/s,邊界層在145?時(shí)產(chǎn)生分離,“尾渦區(qū)”尾跡逐漸變小。所以說,流量計(jì)外部形狀變化使邊界層的分離產(chǎn)生了推遲,探頭也離“尾渦區(qū)”遠(yuǎn)了,此時(shí)探頭處在高速且較穩(wěn)定流場(chǎng)中。
將探頭所處區(qū)域局部放大,觀察模型I流量計(jì)和橢圓水滴型流量計(jì)的探頭流場(chǎng)分布情況如圖10,圖11所示。
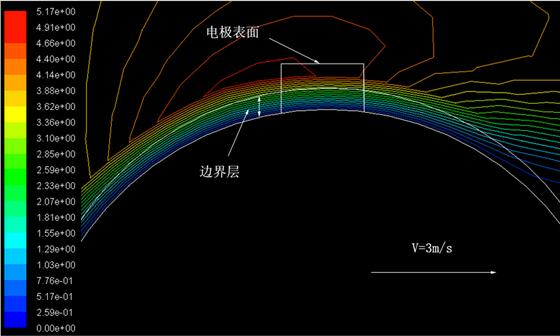
橢圓水滴流線型和流場(chǎng)流動(dòng)貼合度較高,由圖10與圖11對(duì)比發(fā)現(xiàn),橢圓水滴型邊界層厚度相比較圓柱體邊界層厚度而言,明顯變得較薄,并且最大的流速范圍也變寬了 [9] 。
模型I流量計(jì):由圖10發(fā)現(xiàn),探頭所處區(qū)域內(nèi)的流場(chǎng)不太穩(wěn)定,探頭處在速度等值線是(4.90~5.16) m/s的范圍,探頭測(cè)量到的信號(hào)會(huì)有波動(dòng)。
橢圓水滴型流量計(jì):由圖11發(fā)現(xiàn),速度等值線位4.56 m/s處范圍變大,將整個(gè)探頭表面覆蓋了,此時(shí)探頭所測(cè)量到的信號(hào)穩(wěn)定相對(duì)較好。
經(jīng)過對(duì)比發(fā)現(xiàn),相比普通圓柱型探頭,橢圓水滴型流量計(jì)的探頭測(cè)量的流場(chǎng)的信號(hào)強(qiáng)度變化不大,測(cè)量到的信號(hào)穩(wěn)定變高,信號(hào)波動(dòng)變小,信噪比得到了較大提升。
4. 結(jié)論
文中采用Fluent流體軟件仿真分析了新型橢圓型和橢圓水滴型流量計(jì)的流場(chǎng)分布情況,并且分別將其流場(chǎng)分布情況與普通圓柱型流量計(jì)進(jìn)行比較,主要進(jìn)行了下面幾點(diǎn)分析:
(1) 采用Fluent流體軟件對(duì)插入式電磁流量計(jì)的外部流場(chǎng)進(jìn)行仿真分析,通過仿真可以直觀地觀察到流體速度的分布狀況,通過對(duì)探頭安裝于流量計(jì)兩側(cè)以及底面不同的流場(chǎng)分布情況,分析比較了探頭安裝不同位置的優(yōu)缺點(diǎn)。最終確定將探頭安置于有較強(qiáng)流場(chǎng)信號(hào)的位置:即流量計(jì)的兩邊,使探頭的檢測(cè)信號(hào)強(qiáng)度有較大提高。
(2) 將圓柱型流量計(jì)探頭伸入圓管后,流量計(jì)探頭周圍會(huì)產(chǎn)生圓柱繞流現(xiàn)象,促使探頭檢測(cè)信號(hào)引起較大波動(dòng)。所以文中提出將流量計(jì)外部機(jī)構(gòu)由圓柱改為橢圓型和橢圓水滴流線型,使壓差阻力減小,邊界層分離點(diǎn)盡量的后延,從而使探頭處于較穩(wěn)定的高速流場(chǎng)之中,進(jìn)一步使探頭檢測(cè)到的信號(hào)穩(wěn)定性提高。
分別將模型I流量計(jì)與橢圓型流量計(jì)和橢圓水滴型流量計(jì)流場(chǎng)分布的分析仿真圖進(jìn)行對(duì)比,我們發(fā)現(xiàn)橢圓水滴型流量計(jì)比模型I和橢圓型流量計(jì)測(cè)量信號(hào)的穩(wěn)定性都要好,較好的分析了橢圓水滴型流量計(jì)設(shè)計(jì)的可行性。
推薦資訊
- 電磁流量計(jì)在生產(chǎn)測(cè)井中的應(yīng)用2016-11-08
- 電磁流量計(jì)在發(fā)現(xiàn)早期微量溢流和井漏中的設(shè)2017-09-09
- 智能電磁流量計(jì)在鹵水流體計(jì)量中的技術(shù)選用2017-08-29
- 每個(gè)智能電磁流量計(jì)制造商都應(yīng)避免的三種財(cái)2016-11-03
- 概述電磁流量計(jì)三種常見的采購情景與策略2017-02-11
- 碳酸氫銨流量計(jì),碳酸氫銨流量計(jì)廠家價(jià)格2018-07-02
- 工業(yè)再循環(huán)流量計(jì)的增益溫度穩(wěn)定性分析2016-11-22
- 電磁流量計(jì)在袋填充機(jī)預(yù)先確定中的應(yīng)用2016-11-12